


Продолжение
Перейдем к устройству самого робота.
Общая структура робота:
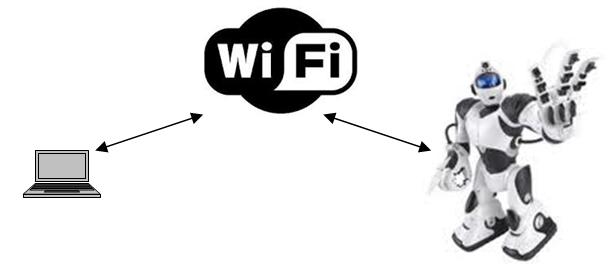
А вот в чем особенность данного робота:

Все что только возможно подключить к компьютеру - все будет там работать.
То есть, получилась открытая система с неограниченной возможностью расширения или модификации.
Схема робота. На схеме показано взаимодействие контроллеров между собой и компьютером:
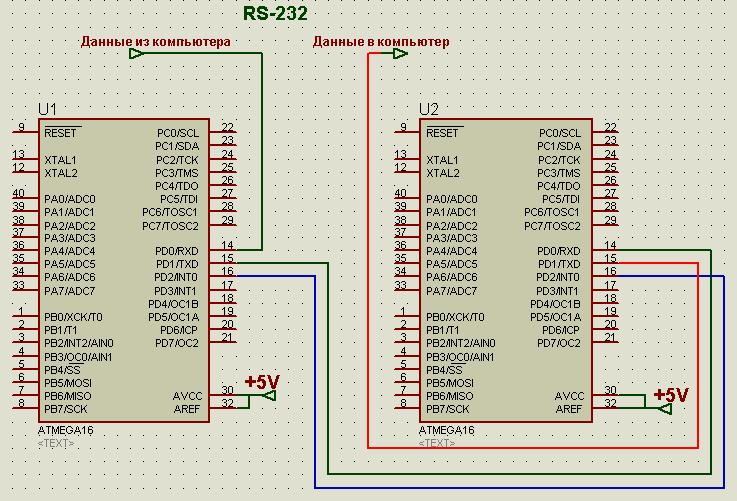
Данные по RS-232 поступают на первый контроллер (программа контроллера SAPIEN), там обрабатываются и сбрасываются на второй контроллер (программа контроллера Driver), а затем отчет поступает в компьютер. Очень удобно для контроля исполнения программы.
На следующем рисунке показана схема работы первого контроллера:
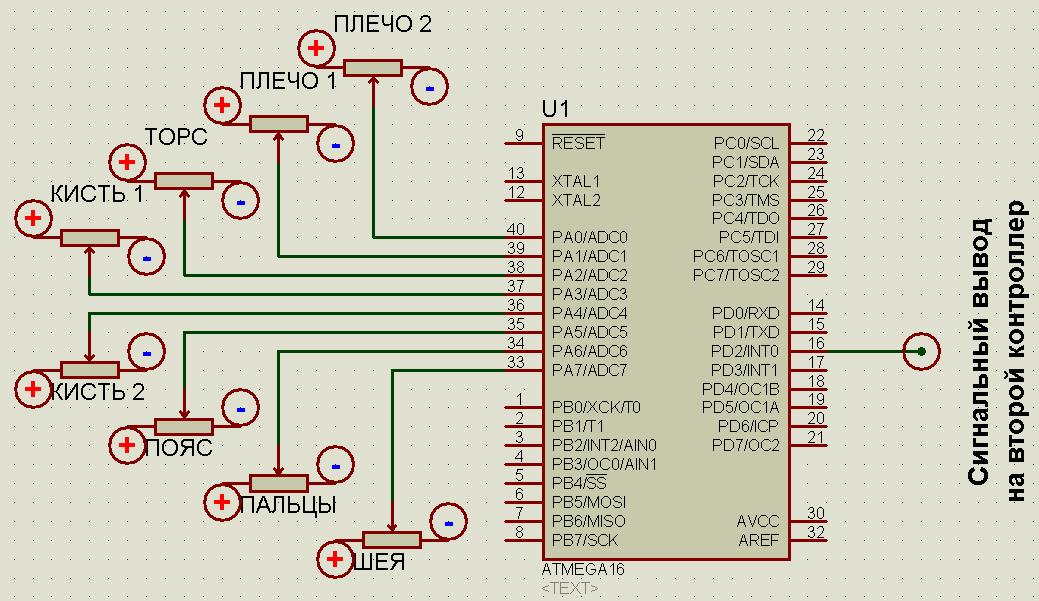
Контроллер запрограмирован на частоту 4МГц. Переменные резисторы номиналом 10КОм. Сигнальный вывод между двумя контроллерами, нужен для синхронизации исполнения команды на втором контроллере, с показаниями переменного резистора на первом контроллере.
Схема второго контроллера:
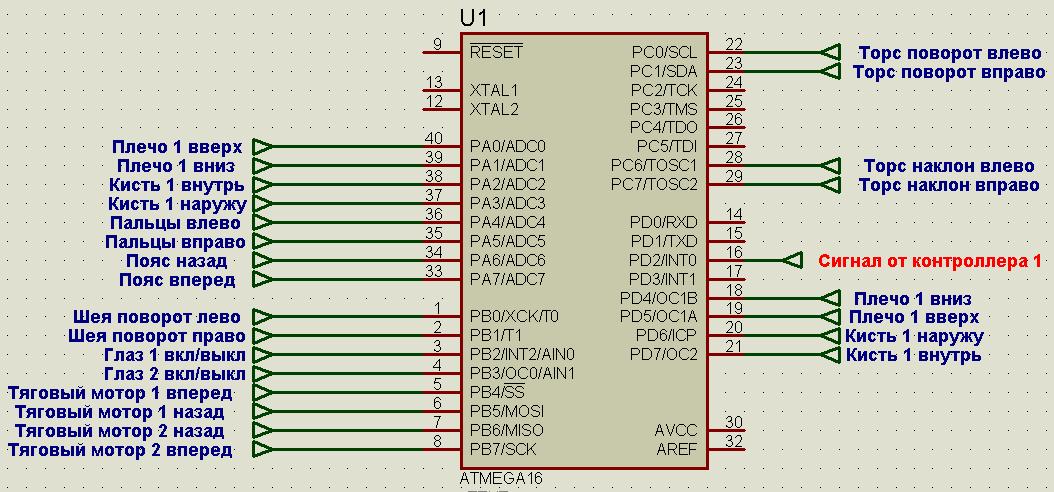
Второй контроллер запрограмирован на частоту 4МГц. Оба контроллера работают от порта USB компьютера (+5В).
Светодиоды глаз подключаются к выводам контроллера через сопротивление номиналом 1КОм.
Микропрограммы и исходники к контроллерам в архиве:
Программы составлены в BASCOM-AVR.
После сборки и программирования платы с контроллерами, надо подключиться к плате управления электродвигателями. К счастью родная плата, установленная в роботе в доработке (напильником) не нуждается, достаточно просто подпаять выходные ножки контроллера к разъему платы (если кто боится - можно подпаяться через дополнительное сопротивления 400 Ом на каждую ножку. Я проверял - при 5 В (напряжение выводов в контроллере) все работает корректно.).
Плату с контроллерами показывать не буду. У каждого она получится своя (хотя если кто соберется и сделает единый вариант - будет здорово).
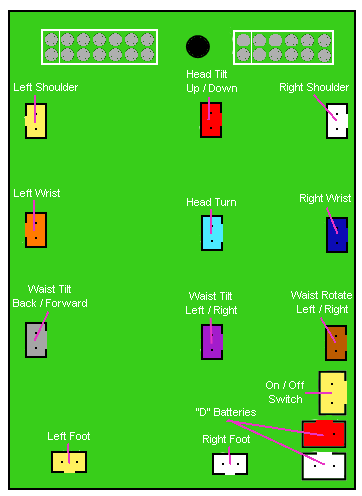
Плата управления моторами (родная, в роботе):
(взято с сайта http://www.robocommunity.com/forum/thread/11248/BrokoSapien-V2/)

Вверху платы нужный нам разъем. Посмотрите внимательно, слевой стороны разъема видны подписи - GND и 9V. Это соответственно - земля и 9 В питания (точнее ровно столько, сколько будет напряжение вашего аккумулятора для питания моторов робота).
Стуктурная схема этой же платы:
и сам разъем непосредственно:
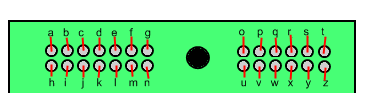
Пины на схеме:
a) Земля o) Левая нога назад
h) 9 В u) Левая нога вперед
b) Левое плечо вниз p) Правая нога вперед
i) Левое плечо вверх v) Правая нога назад
c) Левое запястье влево q) Талия наклон влево
j) Левое запястье вправо w) Талия наклон вправо
d) Голова влево r) Талия поворот влево
k) Голова вправо x) Талия поворот вправо
e) Талия наклон вперед s) Правое запястье вправо
l) Талия наклон назад y) Правое запястье влево
f) Голова вверх t) Правое плечо вниз
m) Голова вниз z) Правое плечо вверх
g) Не используется
n) Не используется
Плата с контроллероми связывается с платой управления двигателями по GND (Земля).