


Глава 4
Переделываем танк
и подключаем его к компьютеру.
Для этой главы был куплен радиоуправляемый танк из набора "танковый бой":


Честно говоря, было наплевать какую игрушку покупать, лишь бы подешевле. Данный экземпляр мне обошелся в 1800 рублей. К минусам модели надо отнести тонкие гусеницы, они как-то неустойчиво двигаются по направляющим. Питание танка осуществляется от Ni-Cd аккумулятора 7,4В. Полюбовавшись внешним видом - занялся его разборкой:
Перевернул танк:
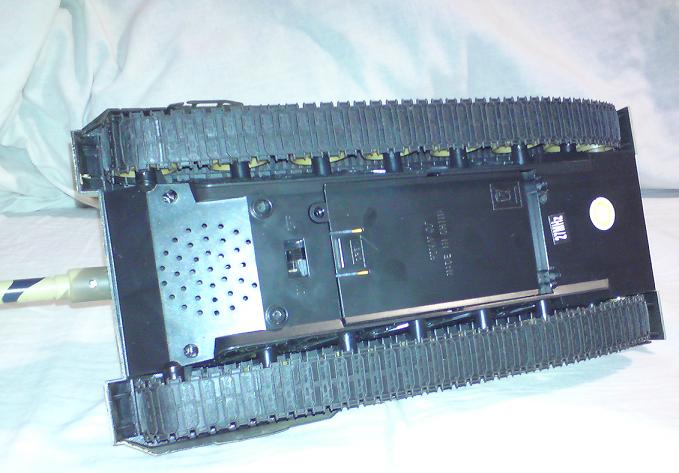
Открыл крышку аккумулятора:

Отсоединил и вытащил аккумулятор:

Откручиваю 4 винта по краям днища:

Поднимаю крышку:
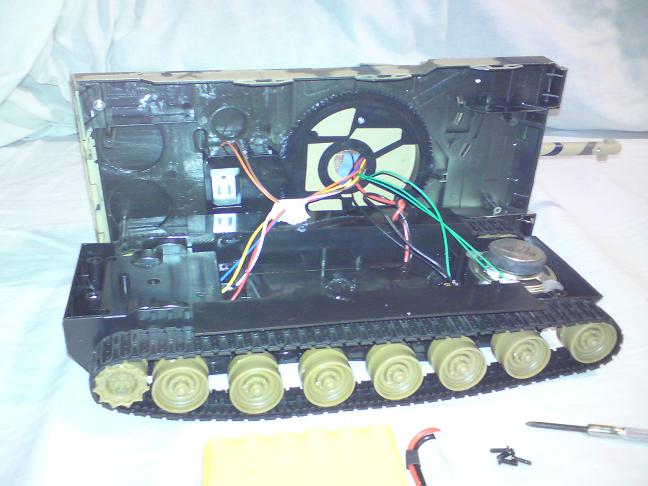
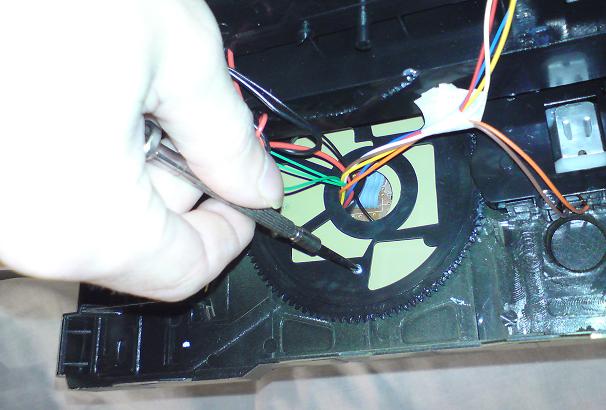
Откручиваю 2 винта, крепящих башню и 3 винта, крепящих мотор-редуктор башни:
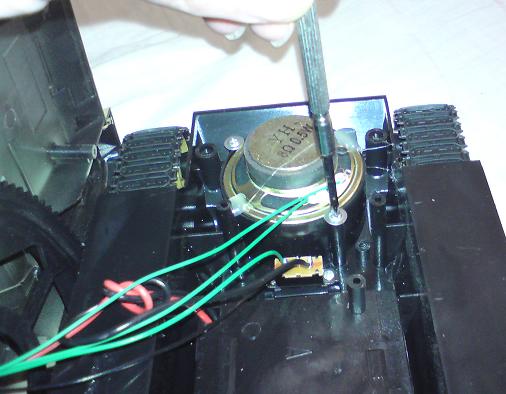
Откручиваю 2 винта, крепящих динамик и снимаю клей:
Откручиваю 2 винта, крепящих выключатель:
Такие операции позволили немного отодвинуть башню от корпуса.
Теперь раскручиваю винты, крепящие башню:

и раскладываю ее на две части (половиню):

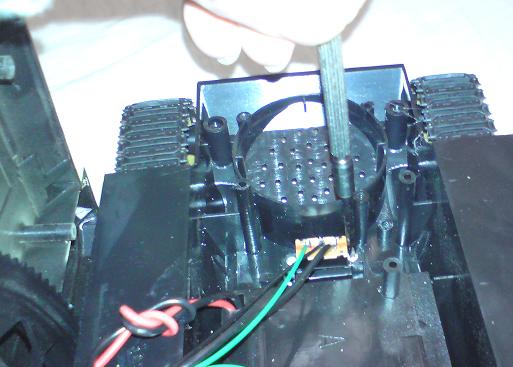
Откручиваю 2 винта крепящих фото-приемник:
И панели индикаторов:
Откусываю провод антенны приемо-передатчика:

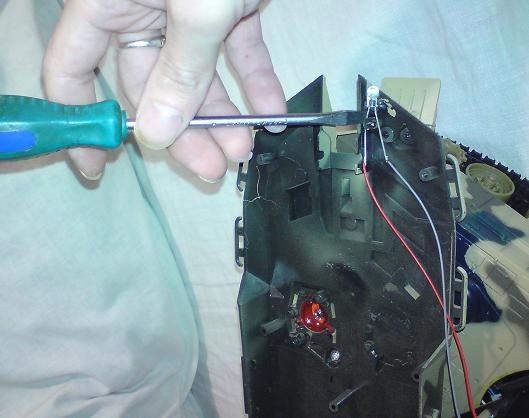
Снимаю светодиод, не знаю за каким хреном он там нужен:
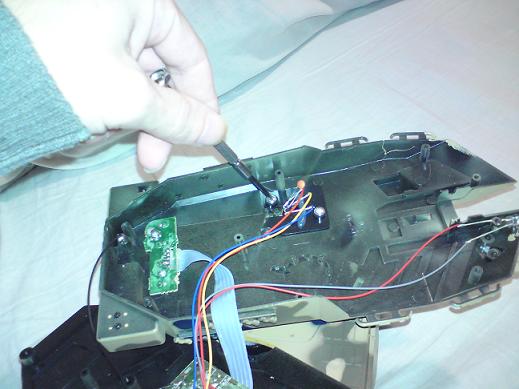
Откручиваю от корпуса башни плату управления:

Вид на плату управления:
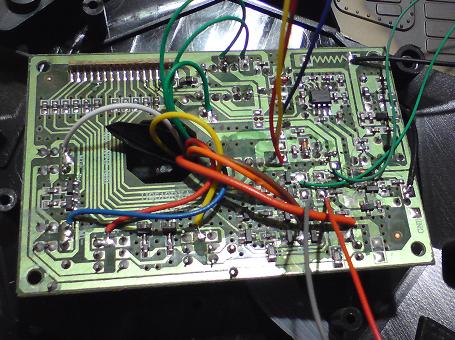
Фотографирую ее, чтобы не путаться потом с тем - куда шли провода.
И отпаиваю от нее все провода (плата - вид с тыла):

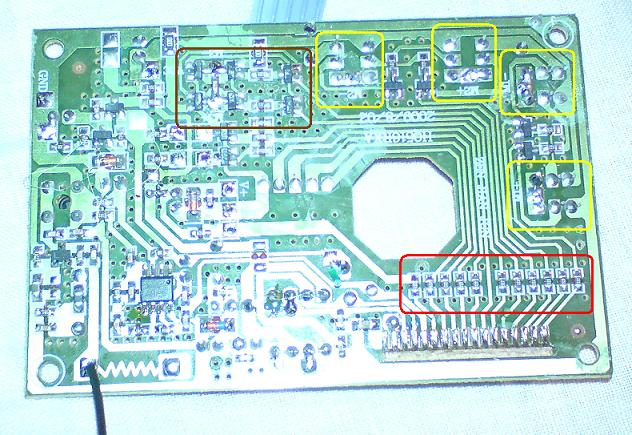
Выпаиваю микросхему управления (отмечено красной рамкой):

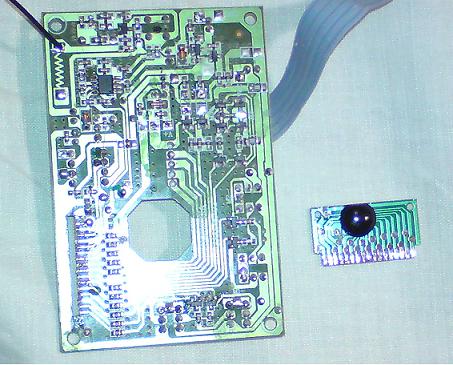
Плата управления и выпаяная микросхема управления:
Внимательно посмотрим на плату управления. Красной рамкой обозначены управляющий входы. Желтыми рамками обозначены выводы на силовые двигатели, коричневой - мостовая схема управления башней (мы его приспосабливаем под подъем/опускание камеры):
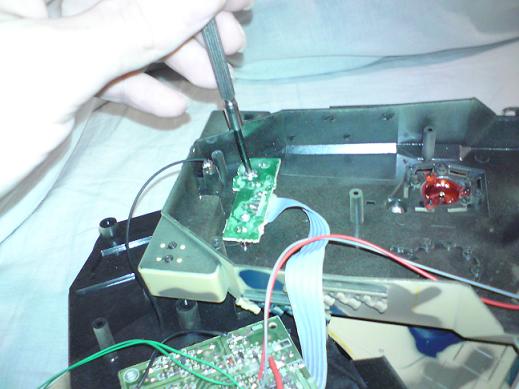
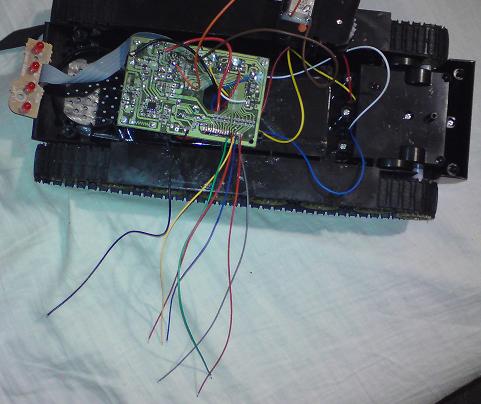
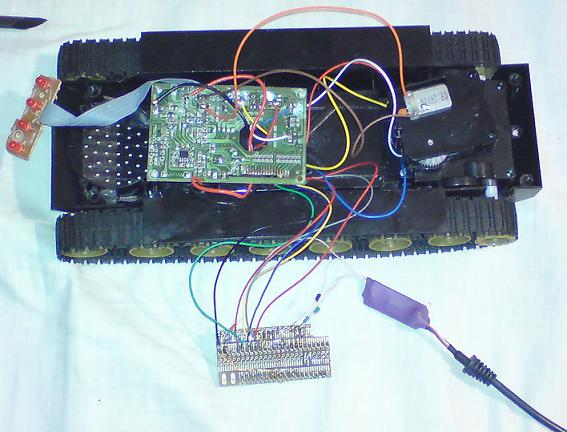
Закрепляем плату на корпусе танка:

И запаиваем провода от силовых двигателей и мотор-редуктора башни обратно:

Оставшиея провода аккуратно подпаиваю к выводам (точнее - вводам) управления:
Выпаиваю (удаляю) с платы контроллера все светодиоды и два резистора 1КОм:

А затем соединяю контроллер и переходник USB-RS232:
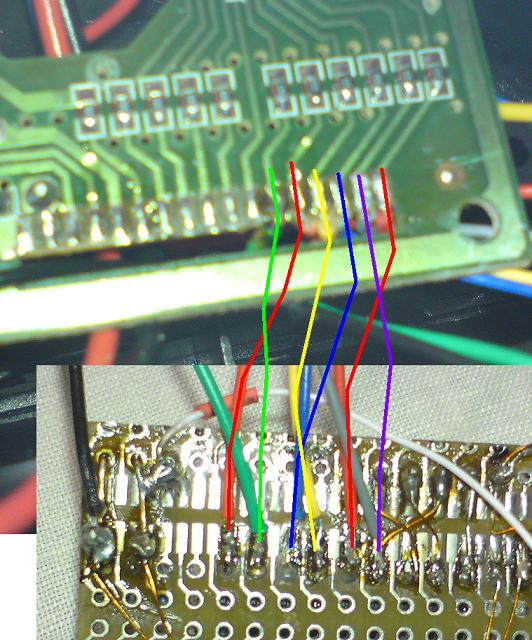
Уточняю как пойдут провода:
|
Микроконтроллер № ножки |
Плата управления № ввода (СПРАВО-на лево!!!) |
|
1 |
5 |
|
2 |
6 |
|
3 |
3 |
|
4 |
4 |
|
5 |
1 |
|
6 |
2 |
Теперь надо нам это хозяйство все испытать.
Как показали испытания, предыдущие версии моих Windows-программ не годятся, некорректно передают контроллеру данные. Оказалось - надо сначала преобразовать каждый символ в другой формат, сцепить вместе и тогда передавать. Для корректной работы была изготовлена программа-тест "TestRobo"
Сначала надо отладить работу силовых двигателей (вместе с двигателем поворота камеры). Для этого запускаем программу, выбираем СОМ-порт (как - уже знаете) и открываем кнопкой "Com Open".
Программа:

Если порт откроется нормально, то цвет кнопки станет зеленым и станут активными кнопки управления.
Нажатие на кнопки "Вперед", "Назад", "Вправо", "Влево" должно запускать двигатели, а "Камера": "Вверх" и "Вниз" - отдельный мотор-редуктор. Ползунок скорости должен отражаться на работе двигателей - чем больше число, тем медленнее крутятся.
Первоначальные испытания показали - задержки в программе контроллера, слишком велики. На скорости 3 двигатели еле прокручивают гусеницы, соответственно поправляю программу:
'///////////////* регулирование скорости с обработкой события *///////////
'///////////////* включения фары и сигнала *///////////
Prt = Portb
'Prt = Pinb
If Res = 0 Then
For I = 0 To J Step 1
Waitms 1 Вот здесь меняю 3 (было) на 1 (стало)
'*******************************'
If Prt < 64 Then
Portb = 0
End If
If Of = 1 Then
Portb = 64
End If
If Of = 2 Then
Portb = 128
End If
If Of = 3 Then
Portb = 192
End If
'*********************************'
Next I
End If
Portb = Prt
'///////////////////*обработка команды с СОМ-порта*/////////////////////////
После чего заливаю в контроллер. К сожалению аккумулятор разрядился, а зарядник на работе, поэтому приходится дальнейшие эксперименты отложить на следующий день, но тем не менее сегодняшние испытания подключения к компьютеру оказались успешными - двигатели танка исправно и послушно запускались и останавливались по командам компьютера